
Heute habe ich mich mal hingesetzt um den Schaltplan und die Funktionsweise der Counter Teils aufzuzeichnen.
Die Funktionsweise ist eigentlich einfach. Wenn man einfach nur die Signalimpulse über einen definierten Zeitraum (der Torzeit) zählen würde, wäre es praktisch nicht möglich bei niedrigen Frequenzen eine vernünftige Auflösung zu bekommen. Für eine 6-stellige Anzeige benötigt man 1 Millionen Takte. Bei 100 Hertz wäre dafür eine Torzeit von 10.000 Sekunden nötig – rund 3 Stunden.
Alternativ dazu kann man die Periode messen. Dazu gibt das Messsignal die Torzeit vor und man zählt, wie viele Takte das Referenzsignal in dieser Zeit abgibt. Das ist bei 100 Hertz gut machbar, bei 1 MHz wiederum kaum mit guter Genauigkeit möglich.
Das hier verwendete Messprinzip ist im Wesentlichen eine Kombination der beiden Messmethoden. Bei einer Messung werden gleich zwei Zähler aktiv. Über den Zeitraum der Torzeit zählt ein Counter die Takte der Referenzfrequenz und ein weiterer die Takte der Signalfrequenz. Über das D FlipFlop wird sicher gestellt, dass die tatsächliche Torzeit immer nur ganze Perioden der Signalfrequenz beträgt. Andernfalls würde man bei niedrigen Frequenzen einen erheblichen Messfehler bekommen.
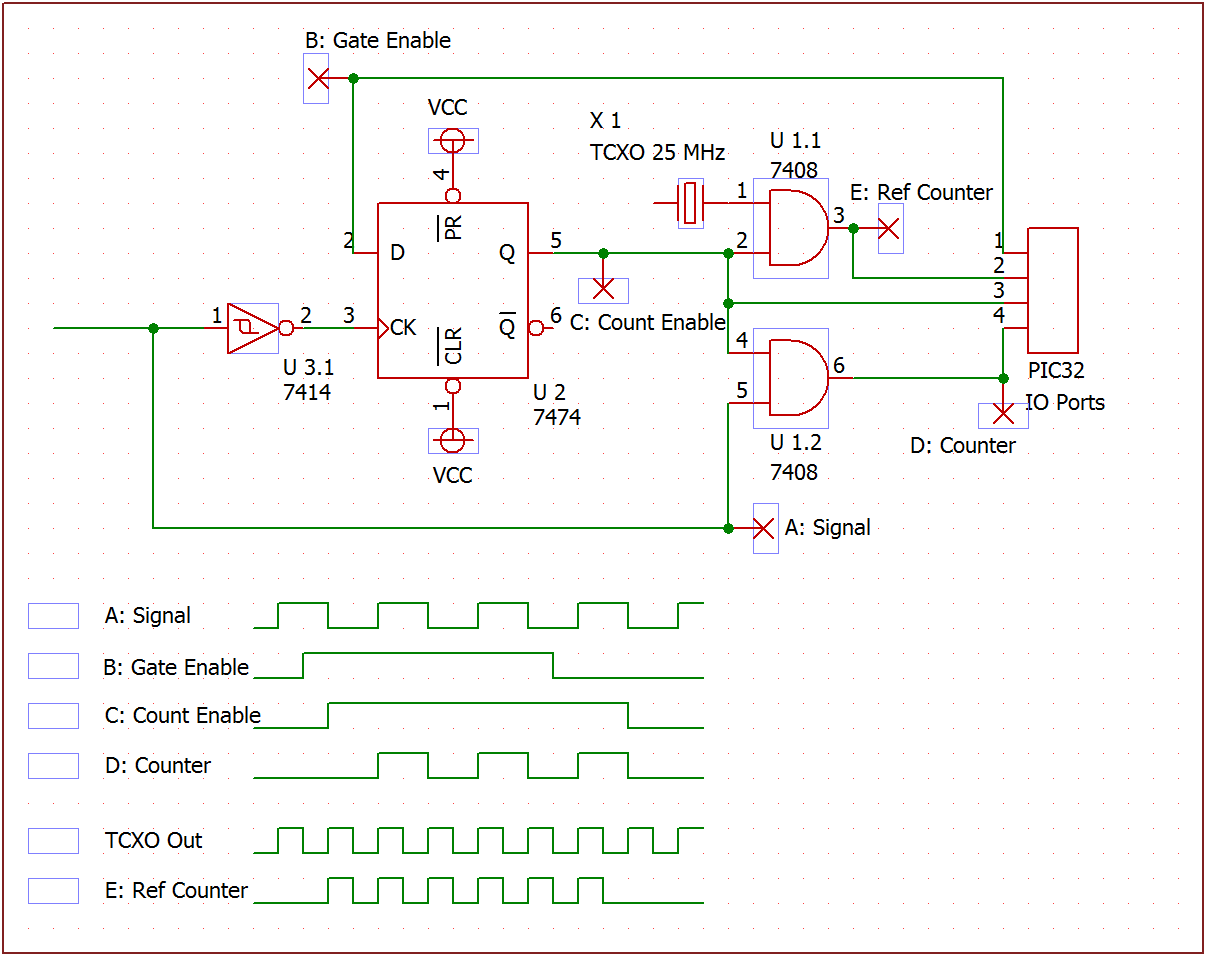
Das Diagramm zeigt ein Eingangssignal von 12,5 MHz an Pin A.
Wenn der Microcontroller eine neue Messsequenz einleiten will, setzt er Pin B auf 1. Da das D FlipFlop ein invertiertes Signal bekommt, wird mit der nächsten fallenden Signalflanke die Torzeit beginnen, der Ausgang Q des FlipFlop springt dann auf 1 (Pin C)
Mit dem Beginn der Torzeit werden über die beiden UND Gatter die beiden Counter für Signal- und Referenzfrequenz freigeschaltet und zählen nun hoch (Pin D und E an Pin 2 und 4 des Microcontrollers).
Der Microcontroller kann den Beginn der Torzeit über seinen Input – Pin C (an Pin 3 des PIC) lesen. Jetzt wartet er die gewünschte Zeit ab (z.B. ca. eine Sekunde) und setzt den Pin B wieder auf 0 zurück. Die genaue Zeit ist hier nicht wichtig, sie geht nicht in das Messergebnis ein solange sie ausreichend groß für die gewünschte Auflösung ist.
Das Tor bleibt jetzt aber noch offen – bis zur nächsten fallenden Flanke des Signals. Damit ist sicher gestellt, dass nur ganze Signalperioden gelesen werden. Wenn der Microcontroller feststellt, dass am Pin C wieder 0 anliegt, weiß er, dass eine Messperiode abgeschlossen ist. Nun kann er die Counter einlesen und das Ergebnis berechnen.
Im Bild sieht man die (viel zu kurze) Torzeit des Microcontrollers am Pin B von 200 nS (5 Referenz-Takte). Durch die Synchronisierung mit dem Signal wird die tatsächliche Torzeit auf 6 Takte gedehnt (Pin C). In dieser Zeit werden 3 steigende Flanken des Signals gezählt und 6 steigende Flanken der Referenz.
Aus diesen Werten kann nun die tatsächliche Signalfrequenz ermittelt werden:
Signalfrequenz = Signal-Takte * Referenzfrequenz / Referenz-Takte = 3 * 25000000 / 6 = 12500000
Natürlich ist die Torzeit in der Zeichnung viel zu kurz. Tatsächlich würde man hier eher eine Torzeit von ca. einer halben Sekunde wählen. Das kann ich nur nicht vernünftig Zeichnen. In diesem Fall würde die Rechnung vielleicht so aussehen ( bei einer Torzeit 0,51 Sekunden):
Signalfrequenz = Signal-Takte * Referenzfrequenz / Referenz-Takte = 6375000 * 25000000 / 12750000 = 12500000